

This project is based on the Minn Kota Endura C2 trolling motor. It comes stock with a 30″ shaft and is rated at 30 pounds thrust. Stock speed control is the standard Minn Kota 5 speeds forward and 3 reverse. My goal is to be able to control the trolling motor’s speed (forward/reverse), direction (tiller position) and tilt remotely. There have been several version of this design and what is below is the latest.
An earlier version used a linear actuator to control steering. In this version, I decided to us an RC servo gearbox setup from ServoCity. I have the 7:1 gearing ratio version.
The earlier version used a 12″ linear actuator to control the tilt and was anchored to my kayak. In this version, I am using a 4″ linear actuator from ServoCity for the tilt function and it is anchored to the trolling motor bracket. This linear actuator provides feedback and is controlled by a Pololu Jrk 21v3 USB Motor Controller purchased from Servo City.
The trolling motor is controlled by a Pololu 18v25 Simple Motor Controller purchased from ServoCity. This motor controller provides a Pulse Width Modulated (PWM) signal to the trolling motor and provides infinite speed control and motor direction control.
-
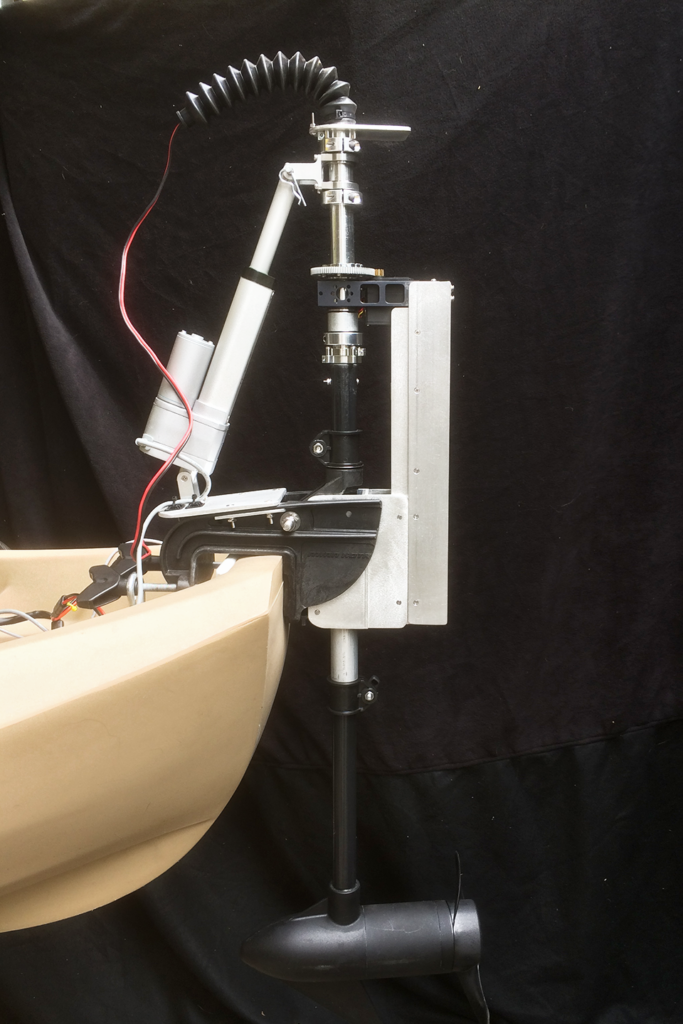
- A – Overall view
-
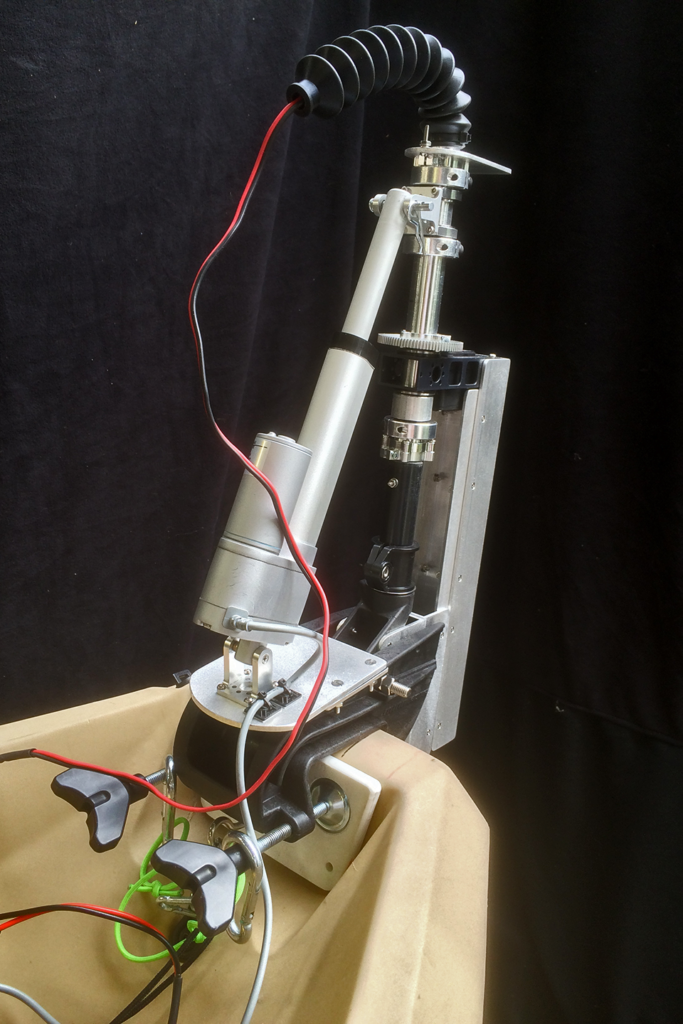
- B – Overall view
-
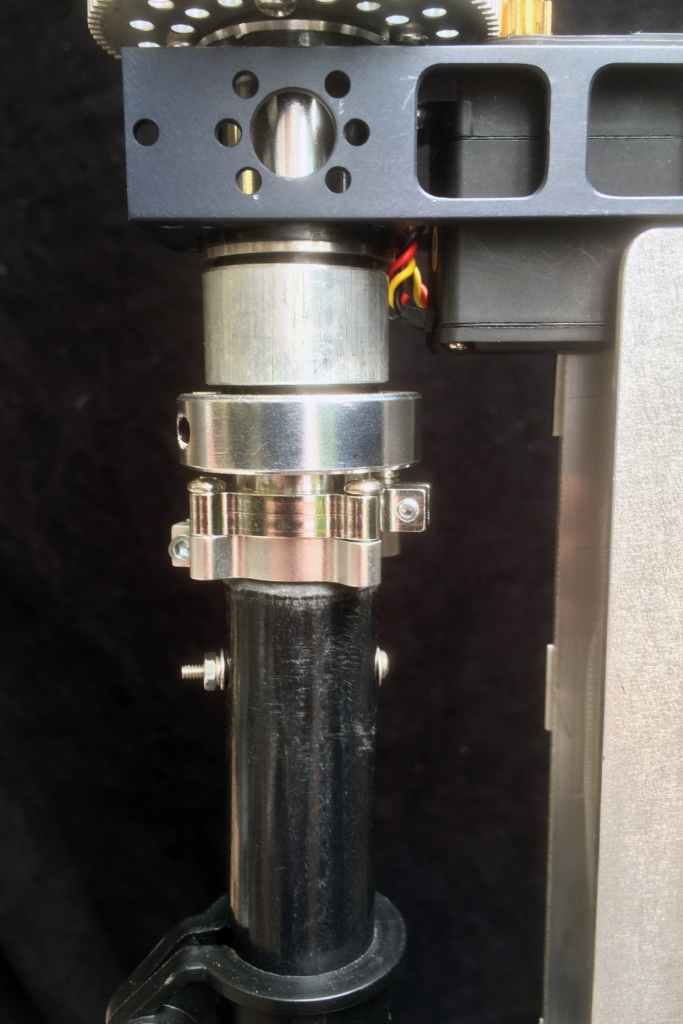
- C – Tilt actuator connection to trolling motor shaft
-
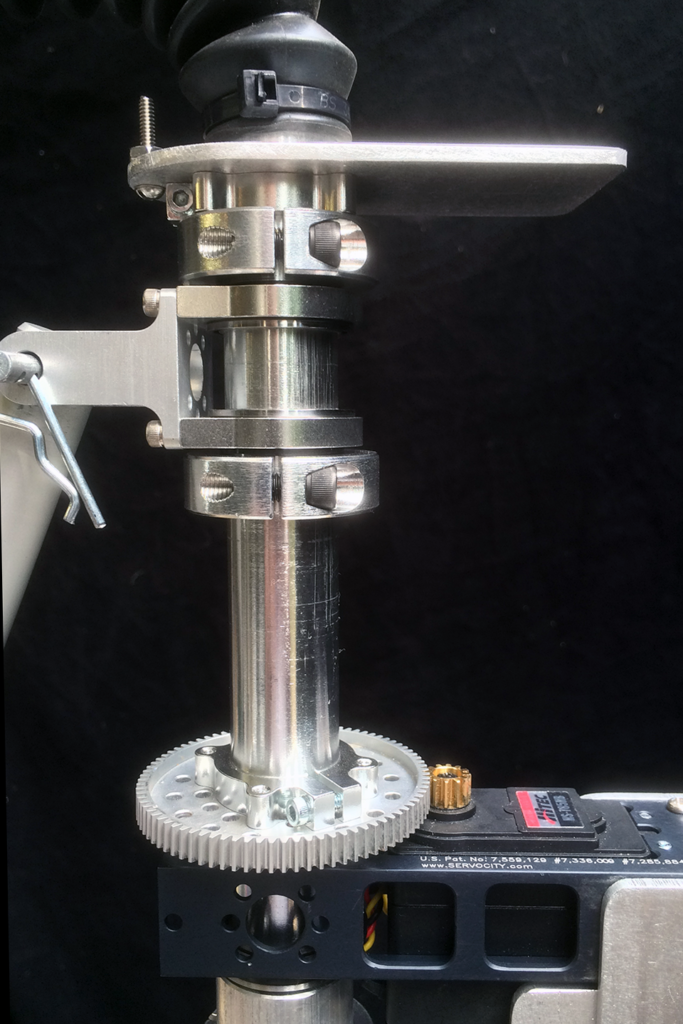
- D – Coupling between steering servo and stock trolling motor shaft
-
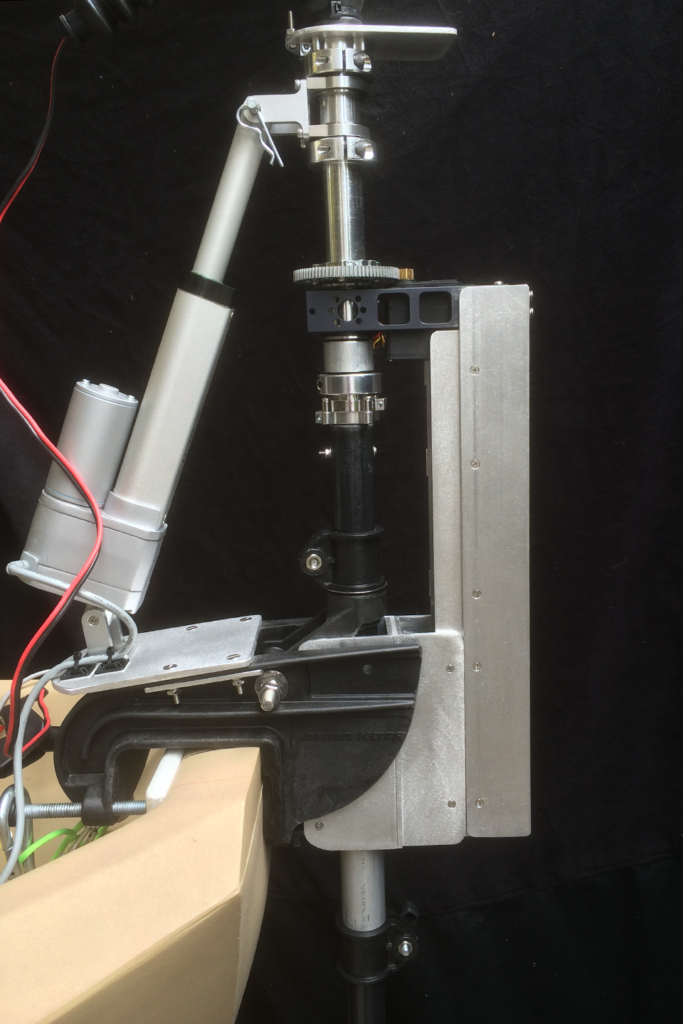
- E – Side view of aluminum bracket assembly
-
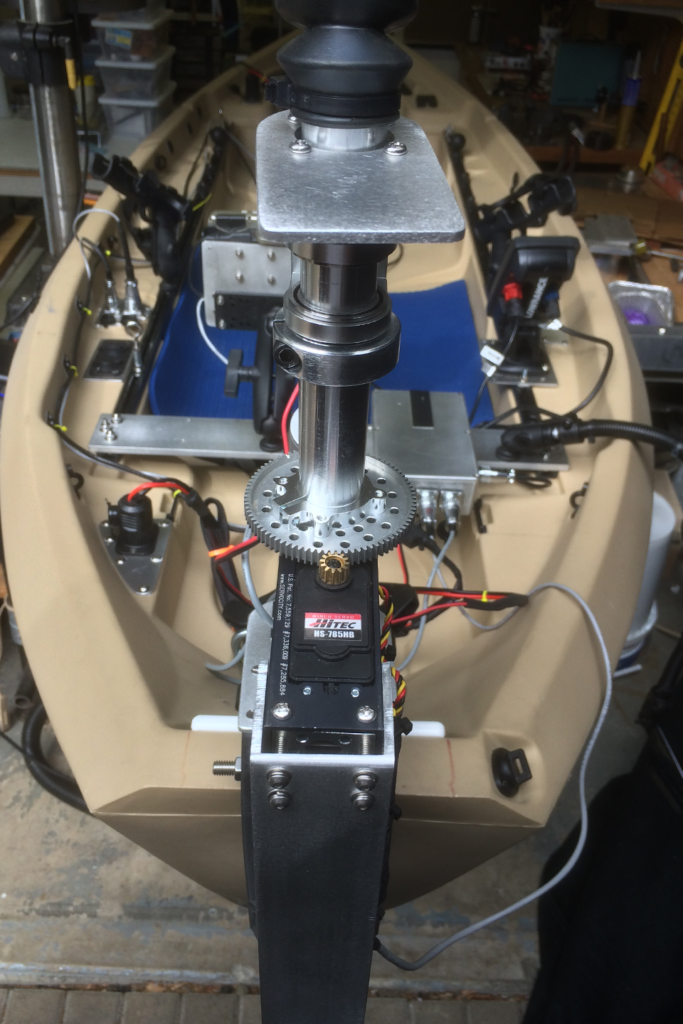
- F – Rear view of Servo Gearbox assembly